|
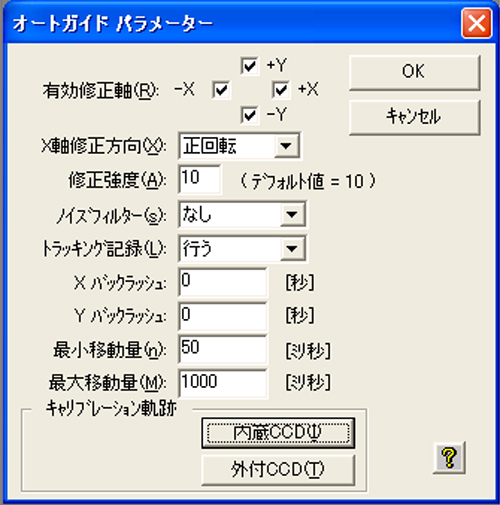
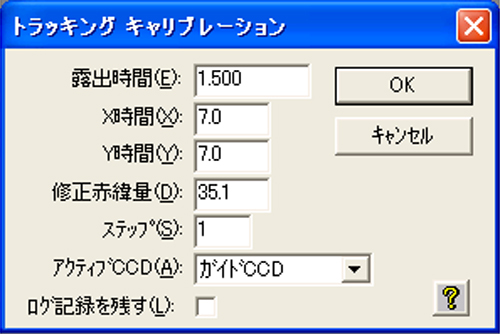
上記のウインドウは、キャリブレーション後に実際にオートガイドを行なう際の「詳細設定」コマンドとなっておりますが、今回はキャリブレートを行なう前に上記「有効修正軸」のみを確認します。
お手元の架台が「2軸モータードライブ」の場合、上記「4方向(+X/-X/+Y/-Y)」の全てにチェックマークが必要となります。なお、このチェックマークが外れている軸方向は「キャリブレート」及び「オートガイド」の際に一切の動作が行なわれません。くれぐれもご注意下さいませ。
なお、その他のパラメータにつきましては、「キャリブレート」には一切無関係となります。最後に「OK」をクリックします。
|